
14. 유용한 ROS 툴 소개
이번 시간에는 rviz, rqt와 같이 ROS에서 제공하는 여러 툴들을 소개하고자 합니다.
다시 돌아온 Gazebo
$ roslaunch gcamp_gazebo gazebo_world.launch이번에는 gazebo가 아닌, rviz를 집중적으로 살펴봅시다!! 🙈

view 전환
rviz는 gazebo와는 다르게 마우스 휠 클릭으로 평행이동, 왼쪽 클릭으로 회전이동이 가능합니다.
더불어, 우측 상단의 view를 통해 시점을 바꿀 수도 있습니다.
Orbit이 기본이며, 제 경험에서는
TopDownOrtho 정도가 쓰이는 것을 보았습니다.

Create, Add Visualization
좌측 Displays 패널을 보시면 여러 항목들이 보이지요?
체크박스들을 토글하면서 어떤 항목인지 살펴보도록 하겠습니다.

- RobotModel
- LaserScan
- PoseArray
- Camera
-
이런 토글 기호를 클릭하여 숨겨진 항목들을 살펴봅니다.
익숙한 것이 보이는데요 Topic /scan?!!
- 맞습니다. publish 되고 있는 lidar 데이터 토픽 이름입니다. 이렇게 데이터 형식과 토픽 이름이 매핑되어 시각화해주는 것입니다.
- 해당 형식의 토픽이 다수 존재한다면, 아래 방향 화살표를 눌러 토픽간 전환이 가능합니다.

LaserScan의 Size 속성을 바꿔보세요!!
아래와 같이 point들의 크기가 바뀌는 것이 보입니다.

새로운 display 추가

위와 같은 버튼을 눌러 display를 추가, 제거, 복사, 이름 변경이 가능합니다.
odom 추가해보기
- add ⇒ by topic ⇒ odom ⇒ odometry 순으로 토픽을 선택해서 추가해 보세요 😉
빨간 화살표가 벡터를 의미하는데요, 로봇의 위치와 방향을 표현한다고 볼 수 있습니다.
노란 부분은 covariance로 odom의 신뢰도를 표시한다고 볼 수 있습니다. 작을수록 좋은 값입니다.

rviz에는 By display type / By Topic의 두가지 add option을 제공합니다.


tf는 tranformation의 약자로 로봇의 각 부분들이 연결된 joint들을 확인할 수 있답니다.
roslaunch로 rviz 실행하기
rviz 또한 ros node입니다. 그렇기에 다음과 같이
rosnode list 실행 시 조회할 수 있습니다.
$ rosnode list
/gazebo
/gazebo_gui
/joint_state_publisher
/robot_state_publisher
/rosout
/rviz_1611581303228680334
당연히 다음과 같이 rosrun으로 실행 시킬 수도
있지요, 추가적으로 rviz라고만 입력해도 실행됩니다.
$ rosrun rviz rviz
or
$ rviz
처음 예제에서 roslaunch 실행 시 rviz도 같이 실행되었는데요, 다음과 같이 launch 파일에 추가할 수 있습니다. 여기 들어가는 .rviz 파일은 설정을 모두 저장한 파일입니다.
<!-- Spawn My Robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -param robot_description -model $(arg model_name)
-x $(arg x) -y $(arg y) -z $(arg z)
-R $(arg roll) -P $(arg pitch) -Y $(arg yaw)"/>
<!--launch rviz-->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(arg dollar)$(arg path)/rviz/tinybot.rviz"/>
</launch>
- tinybot.rviz (
yaml의 형식을 갖습니다.)
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
Splitter Ratio: 0.5
Tree Height: 155
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
rqt
rqt는 다양한 gui 프로그램들의 집합입니다. 가장 먼저, 이전에 사용해보았던
rqt_graph가 있습니다.

이번에는 그냥 rqt를 입력해 보겠습니다.

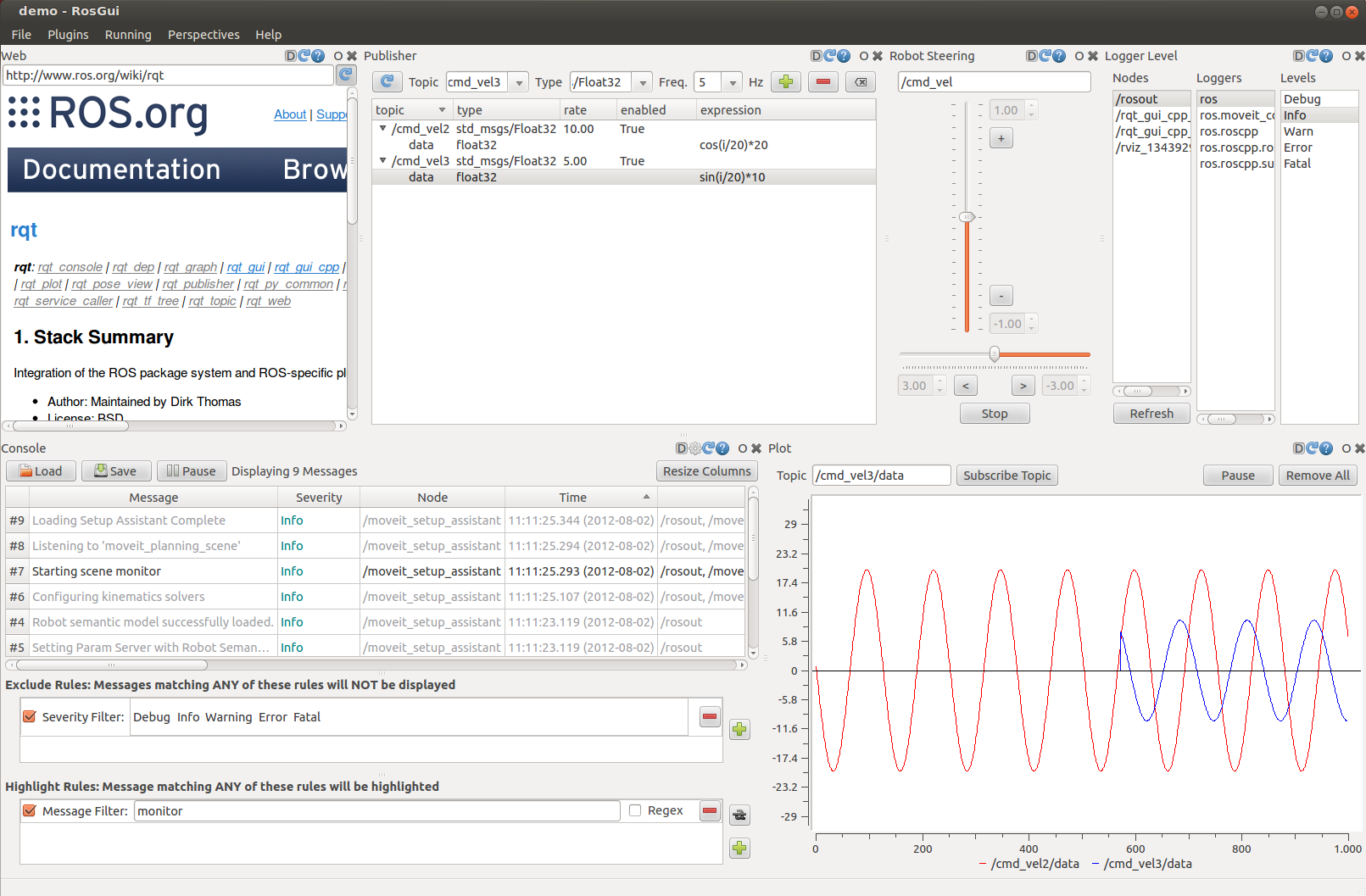
상단에 pulgins를 선택하면, 수많은 rqt 도구들이 보이는데요. 모두 다루지는 않고, topic publisher 와 topic monitor에 대해 알아보겠습니다.
강의를 따라 다음과 같은 화면을 구성해 주세요!
- pulgins ⇒ topics ⇒ Message Publisher
- pulgins ⇒ topics ⇒ Topic Monitor

코딩 없이 Message Publisher로 cmd_vel을 지정하여 publish 해보도록 하겠습니다!!

이제 시뮬레이션을 꺼보고, topic Monitor를 살피도록 하겠습니다.

이렇게 코딩 없이 rqt를 사용해서 topic publish, monitoring을 할 수 있답니다 😉
rqt_plot
수치 데이터를 그래프로 보고싶은 경우 rqt_plot이 유용하게 사용됩니다.
plugin ⇒ visualization ⇒ plot
/cmd_vel/linear를 가지고 그래프를 그려보도록 하겠습니다. 😉

가로, 세로 범위를 잘 지정해주어야 그래프가 보기 쉽습니다. 이것은 Figure Option에서 설정할 수 있습니다.


그 밖에도 수많은 rqt 도구들이 있는데요, 모두 살펴보는 대신 링크로 대체하겠습니다.
유용한 툴들이 정말 많은데, 모두 소개시켜드리지 못해서 아쉬울 정도네요 😢 앞으로 오픈소스 패키지들을 분석하면서, rqt의 강력한 시각화 도구들을 적극 사용하기실 권장합니다.