
25. [ROS RC카] Object Following - 3 & 강의 마무리와 Future Work 소개
🎇 지난 시간에 이어서, find_ball node를 분석해 보겠습니다. 🎇
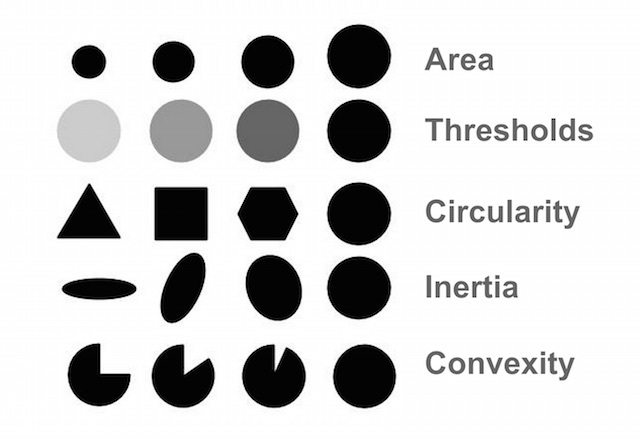
- 그럼 이번엔, main문에 있는 이 수많은 코드들은 무엇일까요?
params = cv2.SimpleBlobDetector_Params()
# Change thresholds
params.minThreshold = 0
params.maxThreshold = 200
# Filter by Area.
params.filterByArea = True
params.minArea = 2000
params.maxArea = 70000 # 640 * 480 = 307,200
# Filter by Circularity
params.filterByCircularity = True
params.minCircularity = 0.1
# Filter by Convexity
params.filterByConvexity = True
params.minConvexity = 0.2
# Filter by Inertia
params.filterByInertia = True
params.minInertiaRatio = 0.7
rospy.init_node("blob_detector", anonymous=True)
ic = BlobDetector(green_min, green_max, blur, params, detection_window)-
물체로 인식되기 위해서는 최소, 최대 어느정도 픽셀 면적을 가져야 하는지,
-
사각형 물체, 원형 물체만 인식할 것인지,
-
얼마나 필터에 적합해야 물체로 인식할 것인지 등의 매개변수를 설정하는 부분입니다.
- 각 매개변수들에 대한 자세한 설명은 레퍼런스를 남기겠습니다.
 https://learnopencv.com/blob-detection-using-opencv-python-c/
https://learnopencv.com/blob-detection-using-opencv-python-c/
이 매개변수들을, cv2.SimpleBlobDetector_create에게
넘겨주면, 픽셀 연산을 거쳐 keypoints(특징점)를 반환합니다. 이 특징점이 바로 우리가 추적하고자 하는 물체의 이미지상에서 위치가
되지요.
- blob_detector
#- Apply blob detection
detector = cv2.SimpleBlobDetector_create(params)
# Reverse the mask: blobs are black on white
reversemask = 255-mask
if imshow:
cv2.imshow("Reverse Mask", reversemask)
cv2.waitKey(0)
keypoints = detector.detect(reversemask)
return keypoints, reversemask
image_blob 토픽입니다.
- 물체로 인식되었다면, 사진과 같이 빨간 동그라미가 생기는 것이 보이며,
- 파란 사각형 바깥 부분은 흐리게 처리되었지요?
연산량을 줄이기 위해, 그리고 외곡이 심한 테두리 부분에서의 오차를 방지하기 위한 처리입니다.
실제 코드에서는 어떻게 구현되어 있는지 살펴보겠습니다.

- find_ball.py
draw_keypoints#--- Detect blobs
keypoints, mask = blob_detect(cv_image, self._threshold[0], self._threshold[1], self._blur,
blob_params=self._blob_params, search_window=self.detection_window )
#--- Draw search window and blobs
cv_image = blur_outside(cv_image, 10, self.detection_window)
cv_image = draw_window(cv_image, self.detection_window, line=1)
cv_image = draw_frame(cv_image)
cv_image = draw_keypoints(cv_image, keypoints)
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
self.mask_pub.publish(self.bridge.cv2_to_imgmsg(mask, "8UC1"))- draw_window : 관심 지역인 파란 사각형을 그려줍니다. 사각형의 크기는 main에 비율 형태의 매개변수를 사용합니다.
- blur_outside : 파란 사각형 바깥 부분은 흐림 처리를 해줍니다.
- draw_frame : 이미지 중심에 카메라 프레임을 그려줍니다.
- draw_keypoints : 최종적으로, 우리가 추적하고자 하는
keypoints를 빨간 동그라미로 표시해줍니다.
각 함수들에 대해서는
include/blob_detector.py를 참조하시길 바랍니다.
대망의 publish
for i, keyPoint in enumerate(keypoints):
#--- Here you can implement some tracking algorithm to filter multiple detections
#--- We are simply getting the first result
x = keyPoint.pt[0]
y = keyPoint.pt[1]
s = keyPoint.size
print ("kp %d: s = %3d x = %3d y= %3d"%(i, s, x, y))
#--- Find x and y position in camera adimensional frame
x, y = get_blob_relative_position(cv_image, keyPoint)
self.blob_point.x = x
self.blob_point.y = y
self.blob_pub.publish(self.blob_point)
break그럼 최종적으로 다음 node에 publish되는 값은 무엇일까요??
여러 물체가 있는 경우에 대비한 코드가 보이며,
get_blob_relative_position로부터의 output을 사용하고 있습니다. 이 함수를
살펴야겠지요.
- get_blob_relative_position
#---------- Obtain the camera relative frame coordinate of one single keypoint
#-- return(x,y)
def get_blob_relative_position(image, keyPoint):
cols = float(image.shape[0]) # 480
rows = float(image.shape[1]) # 640
# print(rows, cols)
center_x = 0.5*rows # 320
center_y = 0.5*cols # 240
# print(center_x)
x = (keyPoint.pt[0] - center_x)/(center_x)
y = (keyPoint.pt[1] - center_y)/(center_y)
return(x,y)음... 잘 와닿지 않지요? 예시를 통해 살펴보겠습니다.
현재 우리가 사용중인 이미지는 [640 * 480]의 크기를 갖습니다.
래서 중심 픽셀은 [320, 240]의 위치를 갖습니다.

이 상황에서, keypoint의 위치가 [370, 240]이라고 한다면
⇒
x = (keyPoint.pt[0] - center_x)/(center_x)
⇒ x = (370 - 320) / 320
이렇게 계산할 수 있습니다.
즉, publish되는 blob_point.x, blob_point.y는 중심으로부터 keypoint가 어느정도 떨어져 있는지를 -1 ~ 1 사이의 값으로 변환시킨 결과라고 할 수 있습니다.
- 다시 큰그림을 살펴보겠습니다.

- csi_pub : 카메라 이미지를 송출해주는 노드
- blob_detector : 컴퓨터 비전이 적용된 노드, 녹색 물체를 찾아내고, 지속적으로 추적
- chase_ball : blob_point.x, blob_point.y를 제어값인 Twist 형식으로 변환
- image_view : 이미지 토픽 뷰어
- blob_chase_node : 실질적인 PWM 제어
길고 길었습니다, 여기까지 따라와주신 여러분들 모두 고생 많으셨습니다. 👍
지금까지 우리가 배운 것
기초 이론부터 시뮬레이션, 그리고 실제 하드웨어 프로젝트까지!! 정말 많은 것들을 살펴보았습니다.
이 강의를 잘 이해하셨다면, 이제 ROS를 사용할 줄 안다고 말할 수 있을 것입니다. 🤖

⛔코드상의 문제가 생겼다면⛔


- 버그, 에러의 경우 여러분의 개발 환경과 함께 문제가 된 상황을 최대한 자세히 알려주세요!!
- 혹시 다른 사람도 이런 문제가 발생했나? 공유하고, 함께 문제를 해결하고 싶다면,
Discussion을 사용해 주세요.
- 다같이 디버깅을 해봐도 도저히 모르겠다. 도와주세요!! ⇒
Issues⇒ 마찬가지로 개발환경, 최대한 자세히!!!
다음으로, 뭘 해볼까요?
- Robotics Roadmap
- ROS2
- Navigation Stack

- Moveit
- rosserial_arduino
이렇게 공부할 패키지들이 정말 많습니다. 이뿐만 아니라, 프로젝트를 해볼 수도 있겠지요
- Robotis

- Spot Micro ROS

- PixHawk
...
🎇지금까지 ROS 강의를 수강해주셔서 정말 감사합니다 🎆
더불어, 촬영에 도움을 주신 G Camp, AI Robotics KR 분들께도 감사드립니다 😉


