Dynamixel Example Code
Path, import
DynamixelSDK/python/tests 내의 Python read write protocol 1.0.py 를 단계별로 살펴보겠습니다.
os.sys.path.append('../dynamixel_functions_py') # Path setting
import dynamixel_functions as dynamixel # Uses DYNAMIXEL SDK librarydynamixel_functions_py패키지내에dynamixel_functions를 import 해줍니다.
Address / Protocol
# Control table address
ADDR_MX_TORQUE_ENABLE = 24 # Control table address is different in Dynamixel model
ADDR_MX_GOAL_POSITION = 30
ADDR_MX_PRESENT_POSITION = 36
# Protocol version
PROTOCOL_VERSION = 1 # See which protocol version is used in the Dynamixel- 자신의 모터에 알맞는 protocol 버전과 address를 기입합니다.
- 자세한 정보는 Dynamixel 홈페이지 내 모터 manual에 기입되어 있습니다.⇒ 예를 들어, AX-12 / AX-12A는 다음 위치에 존재합니다.
ROBOTIS e-Manual
Edit on GitHub NOTE : AX-12+ is the improved version of existing AX-12; the design of circuit, material, and wheel gear are specially improved. NOTE : AX-12A is a new version of the AX-12+ with the same performance but more advanced external design. Only the AX-12A is now being sold.
 https://emanual.robotis.com/docs/en/dxl/ax/ax-12a/#control-table-data-address
https://emanual.robotis.com/docs/en/dxl/ax/ax-12a/#control-table-data-address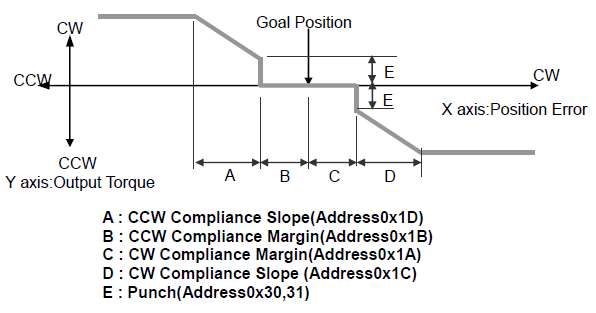
Motor Parameter
# Default setting
DXL_ID = 1 # Dynamixel ID: 1
BAUDRATE = 1000000
DEVICENAME = "/dev/ttyUSB0".encode('utf-8')# Check which port is being used on your controller
# ex) Windows: "COM1" Linux: "/dev/ttyUSB0"
TORQUE_ENABLE = 1 # Value for enabling the torque
TORQUE_DISABLE = 0 # Value for disabling the torque
DXL_MINIMUM_POSITION_VALUE = 100 # Dynamixel will rotate between this value
DXL_MAXIMUM_POSITION_VALUE = 4000 # and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.)
DXL_MOVING_STATUS_THRESHOLD = 10 # Dynamixel moving status threshold
DXL_ID
- 각 모터가 가진 고유한 ID이며, 올바른 설정이 되어 있어야 통신이 가능합니다.
- 모터의 ID 는 위의 소프트웨어(Dynamixel Wizard)를 깔고 컴퓨터와 연결하면 확인할 수 있습니다.
Dynamixel Wizard의 설치과정과 자세한 설명은 하단 링크를 참조하세요ROBOTIS e-ManualEdit on GitHub DYNAMIXEL Wizard 2.0 is an optimized tool for managing DYNAMIXEL's from various operating systems. The following features are provided with DYNAMIXEL Wizard 2.0.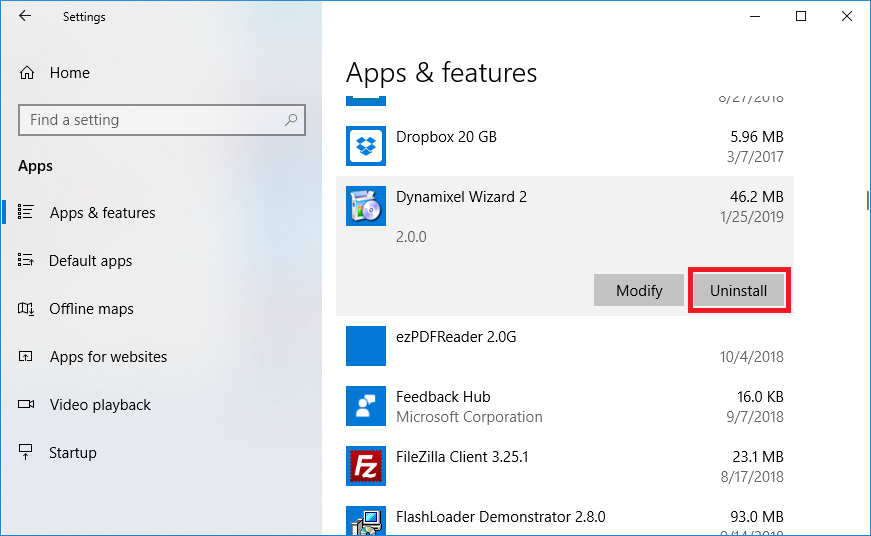
DEVICENAME
- 호스트 PC에서 인식하는 Dynamixel 의 이름이며, 운영체제에 따라 차이가 있습니다.
linux
$ dmesg | grep tty를 통해/dev/ttyUSB0이 연결되었는지 확인합니다.
- 보통 하나의 연결만 있다면
/dev/ttyUSB0에 우선 연결되며, 2개 이상인 경우/dev/ttyUSB1등으로 이름이 변경됩니다.
window
- 제어판 - 장치관리자 - 포트탭에서 확인활 수 있습니다.
- 모터는 각도가 아닌 position value를 이용하여 모터를 제어한다. position value가 어떤 각도에 mapping 되어 있는지 확인 필수
port number, packetHandler
# Initialize PortHandler Structs
# Set the port path
# Get methods and members of PortHandlerLinux or PortHandlerWindows
port_num = dynamixel.portHandler(DEVICENAME)
# Initialize PacketHandler Structs
dynamixel.packetHandler()
index = 0
dxl_goal_position = [DXL_MINIMUM_POSITION_VALUE, DXL_MAXIMUM_POSITION_VALUE] # Goal position
dxl_present_position = 0 # Present position- 이 부분에서는 특별히 설정할 것은 없습니다.
- 위에서 설정한 DEVICENAME에 따라서 port num이 설정되고 패킷 구성 및 패킷 저장에 사용되는 패킷구성에 사용되는 paramerter를 초기화합니다.
Setup
# Open port
if dynamixel.openPort(port_num):
print("Succeeded to open the port!")
else:
print("Failed to open the port!")
print("Press any key to terminate...")
msvcrt.getch()
quit()
# Set port baudrate
if dynamixel.setBaudRate(port_num, BAUDRATE):
print("Succeeded to change the baudrate!")
else:
print("Failed to change the baudrate!")
print("Press any key to terminate...")
msvcrt.getch()
quit()
# Enable Dynamixel Torque
dynamixel.write1ByteTxRx(port_num, PROTOCOL_VERSION, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_ENABLE)
if dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION) != COMM_SUCCESS:
dynamixel.printTxRxResult(PROTOCOL_VERSION, dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION))
elif dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION) != 0:
dynamixel.printRxPacketError(PROTOCOL_VERSION, dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION))
else:
print("Dynamixel has been successfully connected")- Open port : 컨트롤러가 다이나믹셀과 통신하기 위해 port를 엽니다.
- Set port baudrate : 통신 baudrate를 설정합니다.
- Enable Dynamixel Torque
write1ByteTxRx(): DXL_ID의 id를 가진 모터에게 TORQUE_ENABLE value 인 1byte를 ADDR_MX_TORQUE_ENABLE address 로 전달합니다.
Read and Write Dynamixel motor
while 1:
print("Press any key to continue! (or press ESC to quit!)")
if msvcrt.getch().decode() == chr(ESC_ASCII_VALUE):
break
# Write goal position
dynamixel.write2ByteTxRx(port_num, PROTOCOL_VERSION, DXL_ID, ADDR_MX_GOAL_POSITION, dxl_goal_position[index])
if dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION) != COMM_SUCCESS:
dynamixel.printTxRxResult(PROTOCOL_VERSION, dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION))
elif dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION) != 0:
dynamixel.printRxPacketError(PROTOCOL_VERSION, dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION))
while 1:
# Read present position
dxl_present_position = dynamixel.read2ByteTxRx(port_num, PROTOCOL_VERSION, DXL_ID, ADDR_MX_PRESENT_POSITION)
if dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION) != COMM_SUCCESS:
dynamixel.printTxRxResult(PROTOCOL_VERSION, dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION))
elif dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION) != 0:
dynamixel.printRxPacketError(PROTOCOL_VERSION, dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION))
print("[ID:%03d] GoalPos:%03d PresPos:%03d" % (DXL_ID, dxl_goal_position[index], dxl_present_position))
if not (abs(dxl_goal_position[index] - dxl_present_position) > DXL_MOVING_STATUS_THRESHOLD):
break
# Change goal position
if index == 0:
index = 1
else:
index = 0- Enable Dynamixel Torque와 같은 방식이며 각 함수는 다음과 같은 역할을 수행합니다.
write2ByteTxRx(): dxl_goal_position[index] 인 목표 position value를 전달 read2ByteTxRx(): 현재 position value를 읽어오기
Exit
# Disable Dynamixel Torque
dynamixel.write1ByteTxRx(port_num, PROTOCOL_VERSION, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE)
if dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION) != COMM_SUCCESS:
dynamixel.printTxRxResult(PROTOCOL_VERSION, dynamixel.getLastTxRxResult(port_num, PROTOCOL_VERSION))
elif dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION) != 0:
dynamixel.printRxPacketError(PROTOCOL_VERSION, dynamixel.getLastRxPacketError(port_num, PROTOCOL_VERSION))
# Close port
dynamixel.closePort(port_num)- Dynamixel Torque를 Disable 상태로 만들고, port를 닫습니다.
코드 실행시 오류가 날 경우
permission 관련 오류가 날 경우 아래 코드를 한번 실행시키고 진행하면 문제가 해결됩니다.
sudo chmod -R 777 /dev/ttyUSB0