IMU - BNO055
1. 센서 소개

BNO055
IMU 센서 중 하나로 각가속도 3축, 각속도 3축, 지자기 3축을 측정해주는 센서
이 9가지 센서값을 활용하여 현재 센서가 기울어진 각도와 이동 속도를 알 수 있습니다.
기본적으로 센서값에 오차가 많이 있기 때문에 필터 등의 기법을 통해 데이터의 정제가 필요하지만, 이 센서의 경우 기본적인 필터가 내장되어 있어 안정적인 측정값을 제공합니다.
- 구매링크
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 [ada-2472]
Adafruit / Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 [ada-2472] / MCU보드/전자키트 > 센서모듈 > IMU/AHRS(9축 이상) / Euler Vector, 100Hz / Quaterion, 100Hz / Angular Velocity Vector (20Hz) / Acceleration Vector (100Hz) / Magnetic Field Strength Vector (100Hz) / Linear Acceleration Vector (100Hz) / Gravity Vector (100Hz) / Temperature (1Hz)

2. 배선 방법

센서와 Jetson Nano 간의 I2C 통신이 필요하며, 이를 위해 Jetson Nano의I2C1_SDA,I2C1_SCL을 사용합니다.
배선은 다음과 같습니다.
- 센서 - Jetson NanoVin - 5VSDA - 3
- SCL - 5
- GND - GND
3. 설치 방법 및 예제
- pip을 통해 관련 패키지를 설치합니다.
$ sudo pip3 install adafruit-circuitpython-bno055
- 실제 파이썬 프로그래밍 시에는 다음과 같이 import하여 사용합니다.
import board
import adafruit_bno055
기본 예시
BNO055를 통해 얻을 수 있는 모든 센서값들을 추출하고, 이를 콘솔에 출력해 봅시다.
import time
import board
import busio
import adafruit_bno055
# Use these lines for I2C
i2c_bus0 = busio.I2C(board.SCL_1, board.SDA_1)
sensor = adafruit_bno055.BNO055_I2C(i2c_bus0)
# User these lines for UART
# uart = busio.UART(board.TX, board.RX)
# sensor = adafruit_bno055.BNO055_UART(uart)
while True:
print("Accelerometer (m/s^2): {}".format(sensor.acceleration))
print("Magnetometer (microteslas): {}".format(sensor.magnetic))
print("Gyroscope (rad/sec): {}".format(sensor.gyro))
print("Euler angle: {}".format(sensor.euler))
print("Quaternion: {}".format(sensor.quaternion))
print("Linear acceleration (m/s^2): {}".format(sensor.linear_acceleration))
print("Gravity (m/s^2): {}".format(sensor.gravity))
print()
time.sleep(1)
sensor.acceleration: 3축 가속도 측정값
sensor.magnetic: 3축 자기장 측정값
sensor.gyro: 3축 각속도 측정값
sensor.euler: 오일러 체계 각도 계산값
sensor.quaternion: 4원수 체계 각도 계산값
acceleration, magnetic, gyro 는 센서의 측정값이며
euler, quaternion는 센서의 측정값을 활용하여 수학적인 계산을 통해 얻어낸 각도값 입니다.
각도 표시 체계에 따라서 euler 방식과 quaternion 방식 두가지를 제공합니다.
Quaternion - Wikipedia
In mathematics, the quaternion number system extends the complex numbers. Quaternions were first described by Irish mathematician William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space. Hamilton defined a quaternion as the quotient of two directed lines in a three-dimensional space, or, equivalently, as the quotient of two vectors.

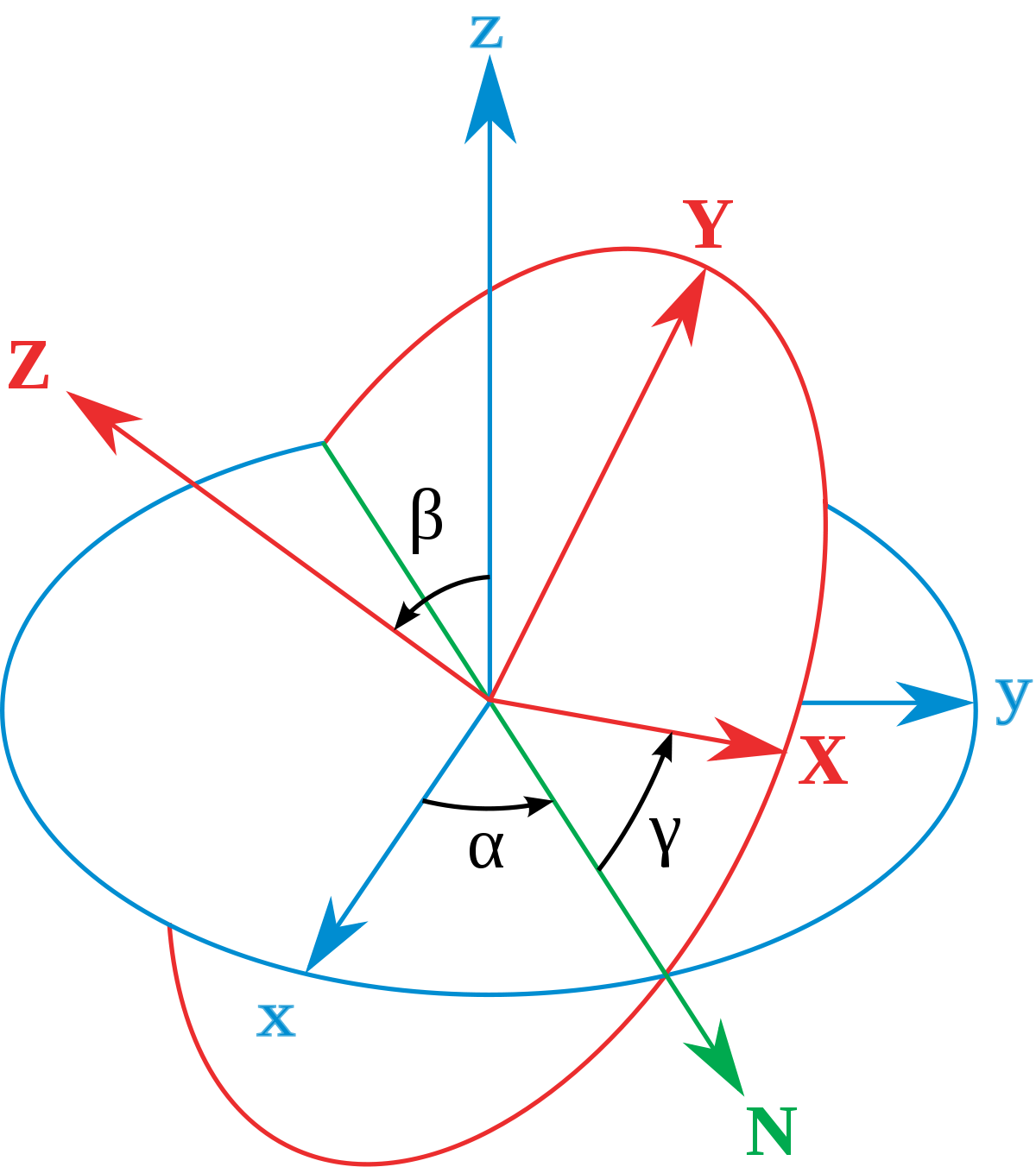
Euler angles - Wikipedia
The Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body with respect to a fixed coordinate system. They can also represent the orientation of a mobile frame of reference in physics or the orientation of a general basis in 3-dimensional linear algebra.
각도 체계에 대한 추가 설명
💡
3차원 상의 각도는 각 축별로 교환 법칙이 성립하지 않습니다. 즉 회전시키는 순서가 바뀌면 결과가 달라집니다!
(x축 90도 회전 후 y축 90도 회전) ≠ (y축 90도 회전 후 x축 90도 회전)
그렇기 때문에 3차원 상에서 각도를 표현할 때는 축별 각도 순서에 대한 약속이 필요하며,
그 중에 한가지 체계가 오일러 각도인 것입니다.

- x축 회전을 roll
- y축 회전을 pitch
- z축 회전을 yaw라고 명명하고
roll ⇒ pitch ⇒ yaw 순서대로 회전시키게 됩니다.
따라서 이를 회전 행렬로 표현하면 다음과 같습니다.

💡
행렬 계산을 할때 xyz 행렬과 제일 가까이 있는 행렬이 먼저 계산되기 때문에 수식상에서는 반대로 Rz Ry Rx 순서로 곱해지게 됩니다.
BNO055 센서의 경우 출력값이 오일러 각도 형식이기 때문에 측정값을 활용할 때 이점을 유의하면서 사용해야 합니다.