Dynamixel SDK manual
로보티즈의 Dynamixel을 제어하기 위해 필요한 작업들을 소개하고 예시 코드를 실행합니다.
Reprository download
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
File Structure
repo clone을 하게 되면 다음의 폴더들이 존재하며 본인이 사용할 언어에 해당하는 폴더를 선택하여 사용하면 됩니다.


Device Setup

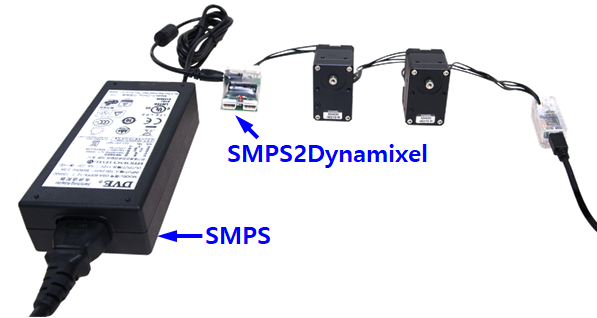
Dynamixel 을 사용하기 위해서는 중간 controller가 필요하며, 이와 Dynamixel을 setup 할 필요가 있습니다.
Controller Setup

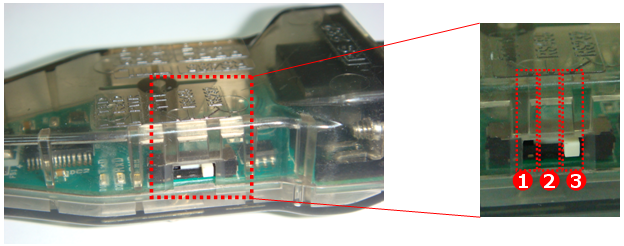

- U2D2가 더 최신에 나온 것으로 다이나믹셀 모터에 따라 다른 통신방식인 TTL과 RS485 방식이 자동으로 전환되어 사용이 훨씬 편리합니다.
- 자세한 설명은 위 링크에 있으며, 모터에 따라 사용하는 통신방식은 하단 사진과 같습니다.

Installation on Windows
💡
FTDI Driver 설치가 필요하며, ROBOTICS RoboPlus software 를 설치하시면 FTDI Driver가 자동으로 설치됩니다.
ROBOTIS
The study of human experiences, experiences, Scroll Down 제22기 사업보고서 및 감사보고서 안녕하세요. 로보티즈 제22기 사업보고서 및 감사보고서 공지드리오니, 자세한 사항은 첨부파일을 참고해주시기 바랍니다.&nbs... 제22기 정기 주주총회 소집공고 안내의 건 주주님의 건승과 댁내의 평안을 기원합니다. 우리 회사는 정관 제24조에 의하여 제22기 정기주주총회를 아래와 같이 개최하오니 참석하여 ... 2021년 새해 복 많이 받으세요!

Jetson nano 보드를 사용하기 때문에 Windows 설치과정은 링크로 대체하겠습니다.
ROBOTIS e-Manual
Edit on GitHub To use the DYNAMIXEL SDK, you need to set up the Controller and DYNAMIXEL. DYNAMIXEL's communicate at one of the following signal levels: Please check to see whether your DYNAMIXEL is a TTL-based DYNAMIXEL or an RS485-based DYNAMIXEL. TTL-based DYNAMIXEL's have 3P connectors while RS485-based DYNAMIXEL's have 4P connectors.
 https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_sdk/device_setup/#controller
https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_sdk/device_setup/#controller
Installation in Linux
⇒ 대부분의 Linux 에서는 FTDI Driver에 관한 FT232RL driver 가 포함되어 있으므로, 따로 driver를 설치할 필요가 없습니다.
Library Setup
언어와 OS에따라 setup 이 다르기 때문에 다음 링크를 참조하세요.
⇒ Spotmicro Dynamixel은 Linux를 사용하고 python을 사용합니다.
ROBOTIS e-Manual
Edit on GitHub The DYNAMIXEL SDK example code for Python uses the library files built in previous step. Run Example Open python folder with Atom. Modify the settings that is needed for the DYNAMIXEL control. Run read_write.py by double click Or run it manually through command prompt, using cd.
https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_sdk/library_setup/python_linux/#python-linux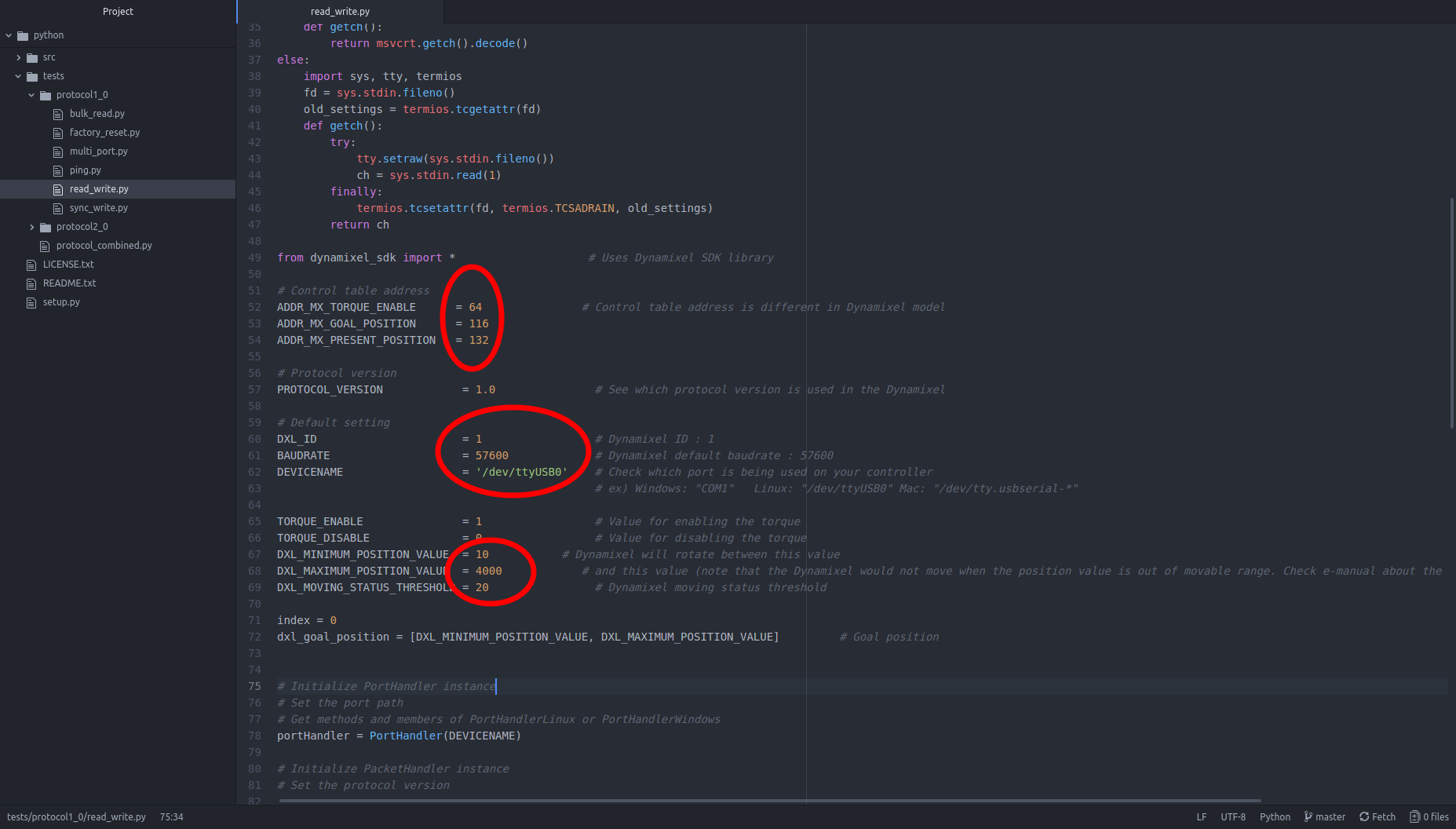
Editor install
- vscode 설치
$ git clone https://github.com/JetsonHacksNano/installVSCode.git
$ cd installVSCode
$ ./installVSCode.sh
$ code .
Download Python for Linux
$ python3 --version # python 버전확인
$ sudo apt-get install python3 # python3 설치💡
python 버전 2.x 도 상관없다고 나와있지만 웬만하면 3.x 이상을 써봅시다!
Library Install
clone한 폴더 python 내에 setup.py 파일을 실행시켜 줍니다.
$ cd DynamixelSDK/python
$ python3 setup.py install
Sample Code 실행
/DynamixelSDK/python/tests 내에 사용중인 Dynamixel 통신 protocol type 에 맞는 예제를 실행시킵니다.
protocol 2.0를 사용하는 모터 시리즈는 다음과 같습니다.

💡
Reference
- Dynamixel SDK Python PortHandler
ROBOTIS e-Manual
Edit on GitHub Base class for serial communication. DEFAULT_BAUDRATE_ :=1000000 Default Baudrate is_using_ Shows whether the port is in-use Method References PortHandler openPort None Detailed Description This function opens the port by setBaudRate function using default baudrate(1M). If the baudrate is needed to be changed to another baudrate value, setBaudRate function should be called again after calling openPort function.
https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_sdk/api_reference/python/python_porthandler/#python- Dynamixel SDK Overview
Overview
Edit on GitHub DYNAMIXEL SDK is a software development kit that provides DYNAMIXEL control functions using packet communication. The API of DYNAMIXEL SDK is designed for DYNAMIXEL actuators and DYNAMIXEL-based platforms. You need to be familiar with C/C++ programming language for right use of the software.
https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_sdk/overview/