13. [Option] C++ 코드, template - 2

13. [Option] C++ 코드, template - 2
지난 시간에 이어서 roscpp코드들을 계속 살펴보겠습니다.
spawn_model_client.cpp
/*
* gazebo model spawn by rosservice
*
* referenced from answers.ros.org
* url : https://pastebin.com/UTWJSScZ
*
* basic template of roscpp service client
*
* referenced from wiki.ros.org
* url : http://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29
*/
#include <fstream> // ros.h doesn't contain this lib
#include <ros/ros.h>
#include <ros/package.h>
#include <gazebo_msgs/SpawnModel.h>
#include <geometry_msgs/Pose.h>
void addXml(gazebo_msgs::SpawnModel& model_in, const std::string& file_path ){
std::ifstream file(file_path);
std::string line;
while (!file.eof()){
std::getline(file, line);
model_in.request.model_xml += line;
}
file.close();
}
geometry_msgs::Pose getPose(){
geometry_msgs::Pose initial_pose;
initial_pose.position.x = -2;
initial_pose.position.y = 1;
initial_pose.position.z = 1;
initial_pose.orientation.z = -0.707;
initial_pose.orientation.w = 0.707;
return initial_pose;
}
int main(int argc, char** argv){
ros::init(argc, argv, "gazebo_spawn_model");
ros::NodeHandle nh;
ros::ServiceClient spawn_model_prox = nh.serviceClient<gazebo_msgs::SpawnModel>("gazebo/spawn_urdf_model");
gazebo_msgs::SpawnModel model;
// add roslib in find_package()
auto file_path = ros::package::getPath("cpp_service_tutorial") + "/models/r2d2.urdf";
addXml(model, file_path);
model.request.model_name = "r2d2";
model.request.reference_frame = "world";
model.request.initial_pose = getPose();
// ServiceClient.call() => return bool type
if (spawn_model_prox.call(model)){
auto response = model.response;
ROS_INFO("%s", response.status_message.c_str()); // Print the result given by the service called
}
else {
ROS_ERROR("Failed to call service /trajectory_by_name");
return 1;
}
return 0;
}이번 코드에서는 본래의 목적인 serviceClient를 생성하는 것과 더불어
여러 유틸리티들을 살펴보고자 합니다.
우선 Service Client의 생성입니다.
ros::ServiceClient spawn_model_prox = nh.serviceClient<gazebo_msgs::SpawnModel>("gazebo/spawn_urdf_model");주고 받을 srv로 instantiation해주고, Server의 이름을 매개변수로 넣어주었습니다.
파이썬과 차이가 나는 부분이 여기 있는데요,
gazebo_msgs::SpawnModel 구조체 안에, request,
response가 같이 들어있기에 아래와 같이 사용됩니다.
gazebo_msgs::SpawnModel model;
model.request.model_name = "r2d2";
model.request.reference_frame = "world";
model.request.initial_pose = getPose();
// ServiceClient.call() => return bool type
if (spawn_model_prox.call(model)){
auto response = model.response;
ROS_INFO("%s", response.status_message.c_str()); // Print the result given by the service called
}
urdf파일 입출력 부분을 볼까요?
#include <fstream> // ros.h doesn't contain this lib
...
void addXml(gazebo_msgs::SpawnModel& model_in, const std::string& file_path ){
std::ifstream file(file_path);
std::string line;
while (!file.eof()){
std::getline(file, line);
model_in.request.model_xml += line;
}
file.close();
}ros.h에는 fstream이 없습니다.
그래서 따로 include 해주었고, 위 코드는 ifstream으로부터 std::string에 한줄씩 담아 model_xml
에게 넘겨주는 부부입니다. 이 코드는 다른 곳에서도 재사용이 가능할 것입니다.
- 다음으로 service call을 하는 부분입니다.
// ServiceClient.call() => return bool type
if (spawn_model_prox.call(model)){
auto response = model.response;
ROS_INFO("%s", response.status_message.c_str()); // Print the result given by the service called
}
else {
ROS_ERROR("Failed to call service /trajectory_by_name");
return 1;
}call() 함수가 bool type을 return 하기 때문에 위와 같은 로직이
구현되었습니다.
기존 파이썬에서는 print만 하면 알아서 예쁘게 출력해주었는데 C++은
c_str()등의 처리가 들어갑니다.
- 추가적으로, 파일 경로를 가져오는 상황에서 유용한
ros::package::getPath입니다.
#include <ros/package.h>
...
// add roslib in find_package()
auto file_path = ros::package::getPath("cpp_service_tutorial") + "/models/r2d2.urdf";
이제 파이썬 Service 예제였던 로봇을 회전시키는 코드를 살펴보겠습니다.
robot_turning_client.cpp
/*
* turn your robot with angular velocity
*
* created by kimsooyoung : https://github.com/kimsooyoung
*/
#include <ros/ros.h>
#include "cpp_service_tutorial/ControlTurningMessage.h"
using srv_t = cpp_service_tutorial::ControlTurningMessage;
using std::cout;
using std::endl;
using std::cin;
int main(int argc, char** argv) {
ros::init(argc, argv, "robot_turning_client");
ros::NodeHandle nh;
ros::ServiceClient client = nh.serviceClient<srv_t>("/control_robot_angle");
ROS_INFO("==== Service Client initialized ====");
// srv type
// uint32 time_duration
// float64 angular_vel
// ---
// bool success
srv_t srv;
unsigned int time_duration;
float angular_vel;
cout << "Enter time_duration : ";
cin >> time_duration;
cin.clear(); cin.ignore(32767, '\n');
cout << "Enter angular_vel : ";
cin >> angular_vel;
cin.clear(); cin.ignore(32767, '\n');
srv.request.time_duration = time_duration;
srv.request.angular_vel = angular_vel;
if ( client.call(srv) ){
auto response = srv.response;
cout << std::boolalpha;
cout << "Response : " << bool(response.success) << endl;
}
else {
ROS_ERROR("Failed to call service /control_robot_angle");
return 1;
}
return 0;
}어느정도 시간 동안 얼마큼의 각속도로 회전할 것인지, 이를 위해 우리만의 custom srv를
만들었습니다. 이렇게 만들어진 srv는 "패키지 이름"/".srv 파일 이름" 으로
include가 가능합니다.
그러다보니 이름이 너무 길어져서 저는 축약형을 따로 정의하였습니다.
using srv_t = cpp_service_tutorial::ControlTurningMessage srv_t;
- service client 생성과 call을 하는 부분입니다. 앞선 gazebo 예제에서 살펴보았기에 간단히 넘어갑니다.
ros::ServiceClient client = nh.serviceClient<srv_t>("/control_robot_angle");
(...)
if ( client.call(srv) ){
- 사용자로부터 input을 받는 부분이 있습니다. 따로 예외처리는 하지 않았지만, 실제 프로젝트를 진행하면서는 너무 큰 각속도를 갖지 않도록 해야 할 것입니다. 커다란 로봇이 갑자기 엄청난 회전을 한다면.... 생각만 해도 끔찍합니다. 🤖🤖
cout << "Enter time_duration : ";
cin >> time_duration;
cin.ignore(32767, '\n'); cin.clear();
cout << "Enter angular_vel : ";
cin >> angular_vel;
cin.ignore(32767, '\n'); cin.clear();
robot_turning_srv.cpp
/*
* referenced from answer.ros.org
*
* url : https://answers.ros.org/question/214597/service-with-class-method/
*/
#include <chrono>
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include "cpp_service_tutorial/ControlTurningMessage.h"
using Request_T = cpp_service_tutorial::ControlTurningMessage::Request;
using Response_T = cpp_service_tutorial::ControlTurningMessage::Response;
class TinyBot {
private:
ros::NodeHandle m_nh;
ros::ServiceServer m_control_ss; // control service_server
ros::Publisher m_vel_pub;
geometry_msgs::Twist m_cmd_vel;
std::string m_name;
public:
TinyBot(const std::string &name_in = "tinybot"): m_name(name_in) {
m_control_ss = m_nh.advertiseService("/control_robot_angle", &TinyBot::servCallback, this);
m_vel_pub = m_nh.advertise<geometry_msgs::Twist>("/cmd_vel", 5);
ROS_INFO("Service Server and Publisher initialized");
ROS_INFO("Waiting for request...");
}
/*
* srv type
*
* uint32 time_duration
* float64 angular_vel
* ---
* bool success
*/
bool servCallback(Request_T &req, Response_T &res) {
m_cmd_vel.angular.z = req.angular_vel;
ROS_INFO("==== Start Turning ====");
auto start = std::chrono::steady_clock::now();
auto now = std::chrono::steady_clock::now();
std::chrono::duration<double> time_duration = now - start;
while (time_duration.count() < req.time_duration){
m_vel_pub.publish(m_cmd_vel);
now = std::chrono::steady_clock::now();
time_duration = now - start;
}
// while ( ros::Time::now() < end_time ){
// // std::cout << ros::Time::now() << std::endl;
// m_vel_pub.publish(m_cmd_vel);
// }
ROS_WARN("==== Stop Turning ====");
m_cmd_vel.angular.z = 0;
m_vel_pub.publish(m_cmd_vel);
res.success = true;
return 1;
}
};
int main(int argc, char** argv){
ros::init(argc, argv, "robot_turning_server");
auto myTinyBot = TinyBot();
ros::spin();
return 0;
}
- ControlTurningMessage.srv
uint32 time_duration
float64 angular_vel
---
bool success
클래스를 사용하고 있습니다. 그 이유에 대해서는 앞서 이야기한 바와 같습니다.
- 주된 내용인 service server를 생성하고 있는 모습입니다. 멤버 함수를 콜백으로 사용하기 위해서, function pointer, object를 받는 것이 보입니다.
TinyBot(const std::string &name_in = "tinybot"): m_name(name_in) {
m_control_ss = m_nh.advertiseService("/control_robot_angle", &TinyBot::servCallback, this);
m_vel_pub = m_nh.advertise<geometry_msgs::Twist>("/cmd_vel", 5);
ROS_INFO("Service Server and Publisher initialized");
ROS_INFO("Waiting for request...");
}이제는 클래스 형태로 구현하는 것이 조금은 익숙해지셨나요? 😎 주로 사용되는
/cmd_vel, /scan과 같은 publisher, subscriber를 담은
클래스를 따로 만들어 재사용할 수도 있겠지요??
나중에 실제 로봇을 제어하신다면 , 거의 ROS에서 구현된 기능들을 상속받아 사용하시게 됩니다. 이를 위해서라도 클래스로의 구현에 익숙해지셨으면 좋겠습니다!!
- service server callback
// srv type
// uint32 time_duration
// float64 angular_vel
// ---
// bool success
bool servCallback(Request_T &req, Response_T &res) {
m_cmd_vel.angular.z = req.angular_vel;
while (time_duration.count() < req.time_duration){
...
res.success = true;
...
}
기존 callback들과 다르게, request, response 두개의 매개변수를 갖습니다.
기능상의 로직은 생략하고, 이제 Action으로 넘어가도록 하겠습니다.
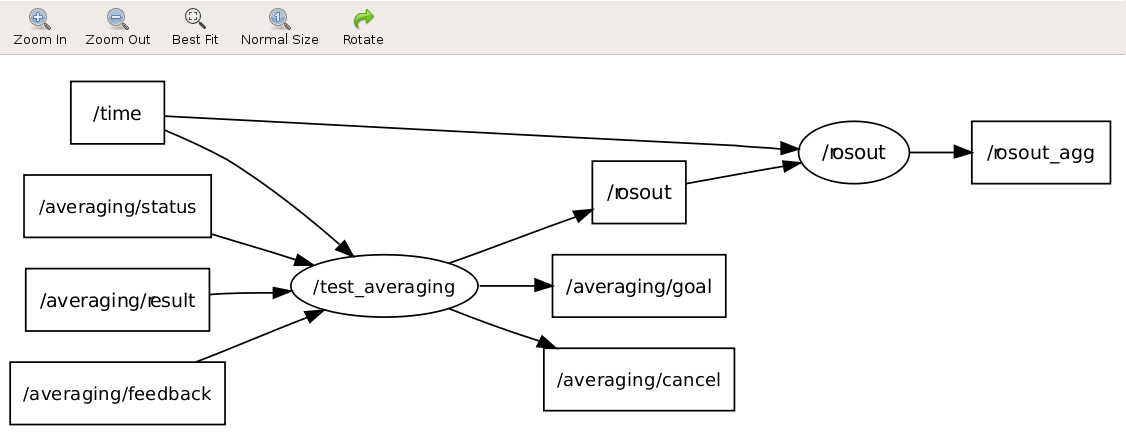
fibonacci_action_server.cpp
시작하기에 앞서, action을 사용하기 위해서는 roscpp 말고도 다음과 같은 패키지들을
CMakeLists.txt에 추가해야 합니다.
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
actionlib_msgs
actionlib # client requires both packages
roscpp
std_msgs
)
python에서도 이렇게 차이가 있었지요?
import rospy
import actionlib
from actionlib_tutorials.msg import FibonacciAction, FibonacciGoal
client = actionlib.SimpleActionClient("fibonacci_action_server", FibonacciAction)
- 더불어 피보나치 예제를 작업하면서 파이썬에서는 sequence를 list로 다루었는데요. C++에서는 std::vector로 다루게 됩니다.
Fibonacci.action
#goal definition
int32 order
---
#result definition
int32[] sequence
---
#feedback
int32[] sequence
/*
* referenced from wiki.ros.org
* url : http://wiki.ros.org/actionlib_tutorials/Tutorials/SimpleActionServer%28ExecuteCallbackMethod%29
*/
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include <actionlib_tutorials/FibonacciAction.h>
/* Fibonacci.action
*
* goal definition
* int32 order
* ---
* result definition
* int32[] sequence
* ---
* feedback
* int32[] sequence
*/
class FibonacciActionClass {
protected:
ros::NodeHandle m_nh;
actionlib::SimpleActionServer<actionlib_tutorials::FibonacciAction> m_as;
std::string m_name;
// vector
actionlib_tutorials::FibonacciFeedback m_feedback;
actionlib_tutorials::FibonacciResult m_result;
public:
FibonacciActionClass(const std::string &name_in = "fibonacci_action_server"):
m_name(name_in),
m_as(m_nh, name_in, boost::bind(&FibonacciActionClass::actionCallback, this, _1), false) {
m_as.start();
ROS_INFO("==== Action Server Class Constructed ====");
}
~FibonacciActionClass(){
ROS_INFO("==== Action Server Class Destroying ====");
}
// must use Ptr type or ConstPtr type!!
void actionCallback(const actionlib_tutorials::FibonacciGoalConstPtr &goal){
ros::Rate r(5);
bool success = true;
int order = int(goal->order);
const auto sequence = &(m_feedback.sequence);
// push_back the seeds for the fibonacci sequence
sequence->clear();
sequence->push_back(0);
sequence->push_back(1);
// publish info to the console for the user
std::cout << m_name.c_str() << ": Executing, creating fibonacci sequence of order " <<
order << " with seeds " << sequence->at(0) << " , " << sequence->at(1) << std::endl;
// start executing the action
for(int i = 1; i <= order; i++){
// check that preempt has not been requested by the client
if (m_as.isPreemptRequested() || !ros::ok()){
ROS_INFO("%s: Preempted", m_name.c_str());
// set the action state to preempted
m_as.setPreempted();
success = false;
break;
}
sequence->push_back(sequence->at(i) + sequence->at(i-1));
// publish the feedback
m_as.publishFeedback(m_feedback);
// this sleep is not necessary, the sequence is computed at 1 Hz for demonstration purposes
r.sleep();
}
if(success){
m_result.sequence = m_feedback.sequence;
ROS_INFO("%s: Succeeded", m_name.c_str());
// set the action state to succeeded
m_as.setSucceeded(m_result);
}
}
};
int main(int argc, char** argv){
ros::init(argc, argv, "fibonacci");
FibonacciActionClass fibonacci;
ros::spin();
return 0;
}
- import 시에 다음과 같은 차이점이 있다는 점에 유의합니다.
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include <actionlib_tutorials/FibonacciAction.h>
- 생성자 부분을 보겠습니다.
class FibonacciActionClass {
protected:
ros::NodeHandle m_nh;
actionlib::SimpleActionServer<actionlib_tutorials::FibonacciAction> m_as;
std::string m_name;
// vector
actionlib_tutorials::FibonacciFeedback m_feedback;
actionlib_tutorials::FibonacciResult m_result;
public:
FibonacciActionClass(const std::string &name_in = "fibonacci_action_server"):
m_name(name_in),
m_as(m_nh, name_in, boost::bind(&FibonacciActionClass::actionCallback, this, _1), false) {
m_as.start();
ROS_INFO("==== Action Server Class Constructed ====");
}
~FibonacciActionClass(){
ROS_INFO("==== Action Server Class Destroying ====");
}
- action server는 아래와 같이 template instantiation을 사용하여 생성합니다. 더불어 server이기 때문에, feedback과 result가 사용되고 있습니다.
actionlib::SimpleActionServer<actionlib_tutorials::FibonacciAction> m_as;
std::string m_name;
// vector
actionlib_tutorials::FibonacciFeedback m_feedback;
actionlib_tutorials::FibonacciResult m_result;
- ~가 붙은 부분은 destructor, 소멸자입니다. 그런데, Action Server에 goal callback을 지정해주는 부분에 새로운 문법이 보입니다.
FibonacciActionClass(const std::string &name_in = "fibonacci_action_server"):
m_name(name_in),
m_as(m_nh, name_in, boost::bind(&FibonacciActionClass::actionCallback, this, _1), false) {
m_as.start();
ROS_INFO("==== Action Server Class Constructed ====");
}
~FibonacciActionClass(){
ROS_INFO("==== Action Server Class Destroying ====");
}boost::bind(&FibonacciActionClass::actionCallback, this, _1)
저 또한 많은 지식을 가진 것이 아니라 간단하게 들어가면,
actionCallback이 몇개의 인자를 받을지,
그 인자들이 어떤 타입일지, 함수일지, 포인터일지, 모르는 상황에서 콜백의 실행을 보다 편리하게 하기 위해, 코드의 양을 줄이기 위해 사용되었다고 이해하시면 좋을
것 같습니다.
지금의 경우 function pointer와 object, 그리고 placeholder 하나가 bind 되었습니다.
- callback시, 유의 사항이 있습니다. goal을 전달받을 때, 반드시 Ptr type으로 전달받아야 합니다!
void actionCallback(const actionlib_tutorials::FibonacciGoalConstPtr &goal){
or
void actionCallback(const actionlib_tutorials::FibonacciGoalPtr &goal){
- 이후의 과정은 비슷하고, publishFeedback, setSucceeded을 통해 feedback/result를 보낸다는 점,
ROS_INFO를 사용하는 방법에 대한 추가 설명을 드릴 수 있습니다.
if (m_as.isPreemptRequested() || !ros::ok()){
ROS_INFO("%s: Preempted", m_name.c_str());
// set the action state to preempted
m_as.setPreempted();
success = false;
break;
}
sequence->push_back(sequence->at(i) + sequence->at(i-1));
// publish the feedback
m_as.publishFeedback(m_feedback);
// this sleep is not necessary, the sequence is computed at 1 Hz for demonstration purposes
r.sleep();
}
if(success){
m_result.sequence = m_feedback.sequence;
ROS_INFO("%s: Succeeded", m_name.c_str());
// set the action state to succeeded
m_as.setSucceeded(m_result);
}
fibonacci_action_client.cpp
/*
* referenced from wiki.ros.org
* url : http://wiki.ros.org/actionlib_tutorials/Tutorials/Writing%20a%20Callback%20Based%20Simple%20Action%20Client
*/
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib_tutorials/FibonacciAction.h>
/* Fibonacci.action
*
* goal definition
* int32 order
* ---
* result definition
* int32[] sequence
* ---
* feedback
* int32[] sequence
*/
void doneCb(const actionlib::SimpleClientGoalState& state,
const actionlib_tutorials::FibonacciResultConstPtr& result)
{
ROS_INFO("[State Result]: %s", state.toString().c_str());
ROS_INFO("Answer: %i", result->sequence.back());
ros::shutdown();
}
// Called once when the goal becomes active
void activeCb()
{
ROS_INFO("Goal just went active");
}
void feedbackCb(const actionlib_tutorials::FibonacciFeedbackConstPtr& feedback){
ROS_INFO("[Feedback] :");
for(auto &elem : feedback->sequence){
std::cout << elem << " ";
}
std::cout << std::endl;
}
int main(int argv, char** argc){
ros::init(argv, argc, "fibonacci_client");
ros::NodeHandle nh;
ros::Rate r(5);
std::string server_name = "fibonacci_action_server";
// turn on auto threading
actionlib::SimpleActionClient<actionlib_tutorials::FibonacciAction> client(server_name, true);
std::cout << "Wating for Server..." << std::endl;
client.waitForServer();
actionlib_tutorials::FibonacciGoal goal;
goal.order = 20;
std::cout << "==== Sending Goal to Server ====" << std::endl;
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
actionlib::SimpleClientGoalState state_result = client.getState();
while (!state_result.isDone()){
// Doing Stuff while waiting for the Server to give a result....
// if (<cancel-condition>){
// client.cancelGoal();
// }
state_result = client.getState();
r.sleep();
}
if (state_result == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("[Action Done State Result]: %s", state_result.toString().c_str());
else
ROS_ERROR("[Something Gonna Wrong State Result]: %s", state_result.toString().c_str());
return 0;
}
- action client는 다음과 같이 생성합니다. 두번째 인자는 auto_threading으로
ros::spin()을 자동으로 실행시켜주는 옵션입니다.
actionlib::SimpleActionClient<actionlib_tutorials::FibonacciAction> client(server_name, true);
sendGoal부분을 살펴보겠는데요, 콜백이 다소 많습니다 😂 순서대로- 완료 시 실행되는 done_callback
- 초기 active 시 한번만 실행되는 active_callback
- 서버로부터 feedback을 받을 때마다 실행되는 feedback_callback
이렇게 세가지 형식이 있습니다.
각 callback으로 돌아오는 인자들을 집중해서 살펴보겠습니다.
void doneCb(const actionlib::SimpleClientGoalState& state,
const actionlib_tutorials::FibonacciResultConstPtr& result)
{
ROS_INFO("[State Result]: %s", state.toString().c_str());
ROS_INFO("Answer: %i", result->sequence.back());
ros::shutdown();
}
// Called once when the goal becomes active
void activeCb()
{
ROS_INFO("Goal just went active");
}
void feedbackCb(const actionlib_tutorials::FibonacciFeedbackConstPtr& feedback){
ROS_INFO("[Feedback] :");
for(auto &elem : feedback->sequence){
std::cout << elem << " ";
}
std::cout << std::endl;
}
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
- Action Client는 server가 작업을 수행중인 동안 다른일을 할 수 있다고 말했지요?
더불어, goal cancel을 요청할 수 있는 cancelGoal() 함수도
보입니다.
while (!state_result.isDone()){
// Doing Stuff while waiting for the Server to give a result....
// if (<cancel-condition>){
// client.cancelGoal();
// }
state_result = client.getState();
r.sleep();
}
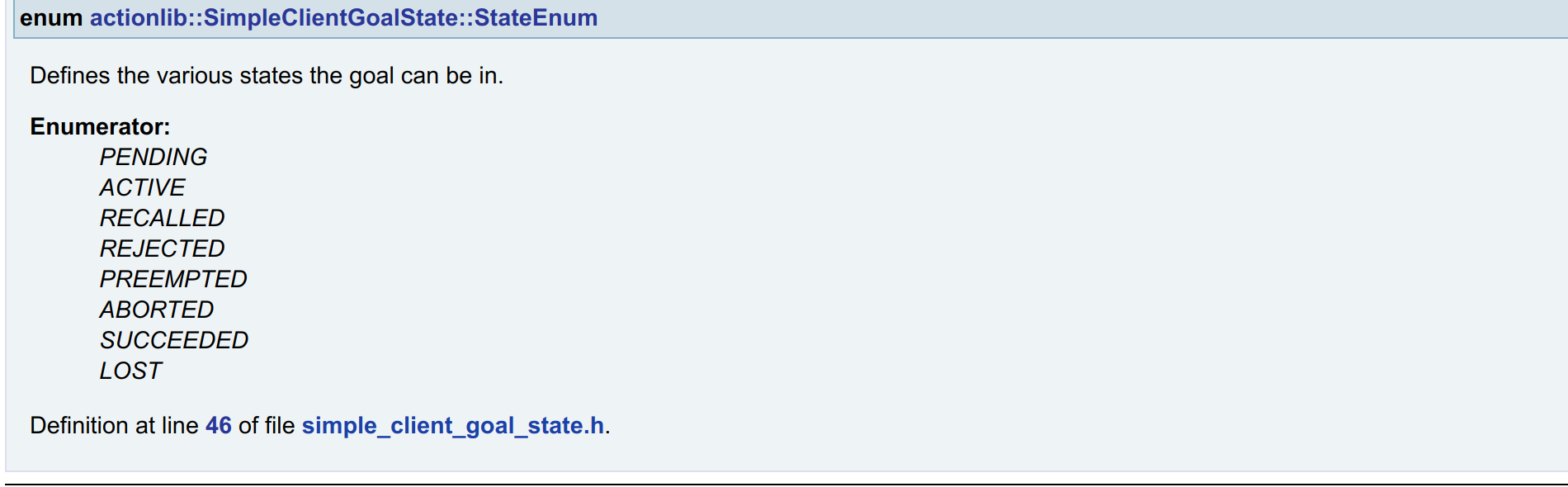
- 최종 result state에 따라 디버깅 메세지를 출력하는 부분입니다.
if (state_result == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("[Action Done State Result]: %s", state_result.toString().c_str());
else
ROS_ERROR("[Something Gonna Wrong State Result]: %s", state_result.toString().c_str());
앞서 파이썬 프로그래밍을 배웠기에, 대응되는 함수들을 한번씩 살펴보았습니다.
그럼 어려운 C++을 왜 쓰나요 ❓❓
로봇은 결국 하드웨어를 다루는 작업입니다. 간단히 이야기해서, 제품을 만들거나 연구를 하는 상황에서, 사용하는 하드웨어, 알고리즘으로의 최적화가 필요하기에 C++을 사용한다고 말씀드리고 싶습니다.
최고의 성능이 필요하지 않고, 빠르게 개발하여 결과를 보고 싶은 우리의 경우, 파이썬이 더 적합하다고 생각합니다. 그래서 앞으로의 ROS RC Car 프로젝트에서도 파이썬을 사용하구요.
Reference
읽어볼만한 레퍼런스들을 링크해 두었습니다.
고급 ROS 프로그래머도 거듭나기 위해 저도 열심히 공부중이랍니다. 😉

다음 시간에는rviz,rqt와 같은 디버깅을연구 도와주는 유용한 툴들에 대해서 배워보도록 하겠습니다!!