21. [ROS RC카] ROS 연동 RC카 주행 2
21. [ROS RC카] ROS 연동 RC카 주행 2
지난 시간에 이어서 코드 설명을 계속해 보겠습니다.
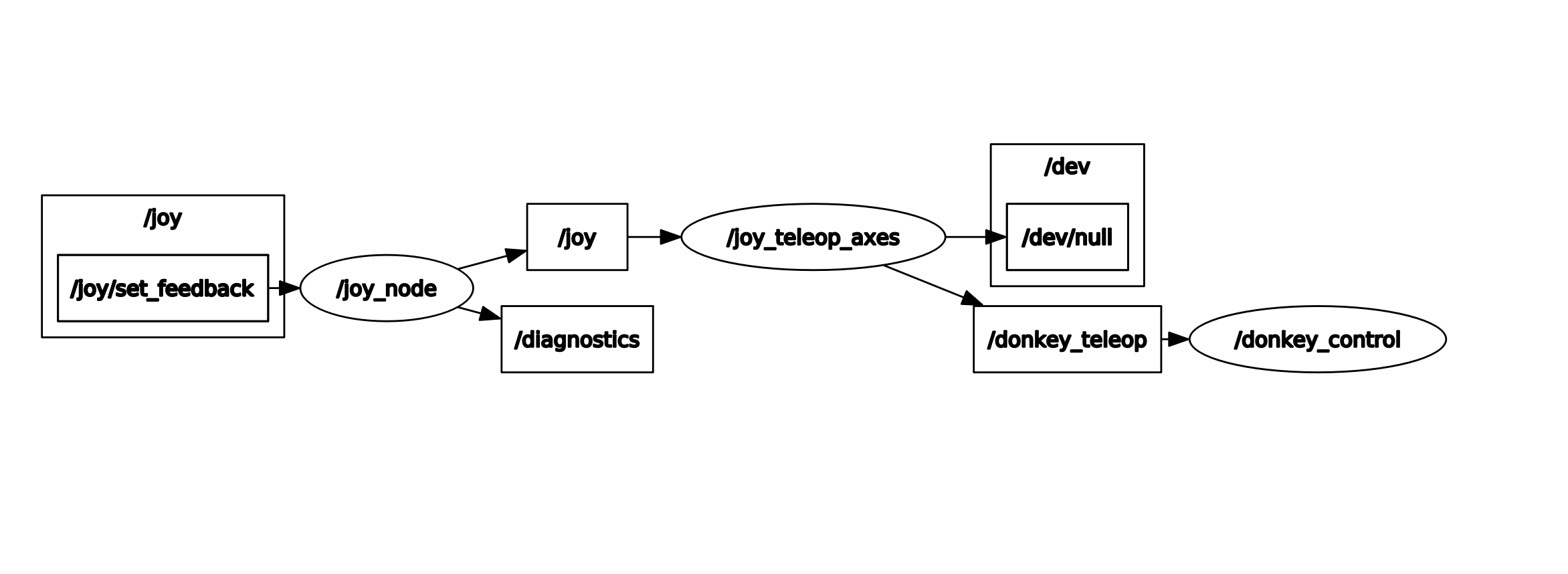
- joy node ⇒ joy teleop axes :
publish : sensor_msgs/Joy
- joy teleop axes ⇒ donkey_control :
subscribe : sensor_msgs/Joy
publish : ackermann_msgs/AckermannDriveStamped
- donkey_control :
subscribe : ackermann_msgs/AckermannDriveStamped
⇒
PWM (PCA9685)
끝단 노드에서부터 역순으로 올라오면서 살펴보도록 하겠습니다.
donkey_control
- joy_control.py
코드는 다음 위치에 있습니다. ⇒
donkey_ros/donkey_control/src
#!/usr/bin/env python
"""
Node for control PCA9685 using AckermannDriveStamped msg
referenced from donekycar
url : https://github.com/autorope/donkeycar/blob/dev/donkeycar/parts/actuator.py
"""
import time
import rospy
from threading import Thread
from ackermann_msgs.msg import AckermannDriveStamped
class PCA9685:
"""
PWM motor controler using PCA9685 boards.
This is used for most RC Cars
"""
def __init__(
self, channel, address=0x40, frequency=60, busnum=None, init_delay=0.1
):
self.default_freq = 60
self.pwm_scale = frequency / self.default_freq
import Adafruit_PCA9685
# Initialise the PCA9685 using the default address (0x40).
if busnum is not None:
from Adafruit_GPIO import I2C
# replace the get_bus function with our own
def get_bus():
return busnum
I2C.get_default_bus = get_bus
self.pwm = Adafruit_PCA9685.PCA9685(address=address)
self.pwm.set_pwm_freq(frequency)
self.channel = channel
time.sleep(init_delay) # "Tamiya TBLE-02" makes a little leap otherwise
self.pulse = 340
self.prev_pulse = 340
self.running = True
def set_pwm(self, pulse):
try:
self.pwm.set_pwm(self.channel, 0, int(pulse * self.pwm_scale))
except:
self.pwm.set_pwm(self.channel, 0, int(pulse * self.pwm_scale))
def run(self, pulse):
pulse_diff = pulse - self.prev_pulse
if abs(pulse_diff) > 40:
if pulse_diff > 0:
pulse += 0.7 * pulse_diff
else:
pulse -= 0.7 * pulse_diff
self.set_pwm(pulse)
self.prev_pulse = pulse
def set_pulse(self, pulse):
self.pulse = pulse
def update(self):
while self.running:
self.set_pulse(self.pulse)
class Vehicle(object):
def __init__(self, name="donkey_ros"):
self._throttle = PCA9685(channel=0, busnum=1)
rospy.loginfo("Throttle Controller Awaked!!")
self._steering_servo = PCA9685(channel=1, busnum=1)
rospy.loginfo("Steering Controller Awaked!!")
self._name = name
self._teleop_sub = rospy.Subscriber(
"/donkey_teleop",
AckermannDriveStamped,
self.joy_callback,
queue_size=1,
buff_size=2 ** 24,
)
rospy.loginfo("Teleop Subscriber Awaked!! Waiting for joystick...")
def joy_callback(self, msg):
speed_pulse = msg.drive.speed
steering_pulse = msg.drive.steering_angle
print(
"speed_pulse : "
+ str(speed_pulse)
+ " / "
+ "steering_pulse : "
+ str(steering_pulse)
)
self._throttle.run(speed_pulse)
self._steering_servo.run(steering_pulse)
if __name__ == "__main__":
rospy.init_node("donkey_control")
myCar = Vehicle("donkey_ros")
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rate.sleep()항상 그랬던 것과 같이 앞에서부터 차근차근 살펴보도록 하겠습니다. 😎😎
- import
앞서 살펴본 ackermann_msgs의 AckermannDriveStamped가 보입니다.
import time
import rospy
from threading import Thread
from ackermann_msgs.msg import AckermannDriveStamped
어떠한 모습이었는지 다시 한 번 짚고 넘어가겠습니다.
$ rosmsg info ackermann_msgs/AckermannDriveStamped
std_msgs/Header header
uint32 seq
time stamp
string frame_id
ackermann_msgs/AckermannDrive drive
float32 steering_angle
float32 steering_angle_velocity
float32 speed
float32 acceleration
float32 jerk
- main
if __name__ == "__main__":
rospy.init_node("donkey_control")
myCar = Vehicle("donkey_ros")
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rate.sleep()Vehicle이라는 클래스를 생성하고, 10Hz의 주기를 갖고 반복시키고 있습니다.
- Vehicle Class
실질적인 subscriber입니다.
PCA9685 클래스 2개를 선정하고 있으며, 유의하셔야 할 점으로, 버벅임을 줄이기 위해 buff_size를 추가 설정한 것이 보입니다.
로그를 찍고 있는 모습도 보이네요.
class Vehicle(object):
def __init__(self, name="donkey_ros"):
self._throttle = PCA9685(channel=0, busnum=1)
rospy.loginfo("Throttle Controller Awaked!!")
self._steering_servo = PCA9685(channel=1, busnum=1)
rospy.loginfo("Steering Controller Awaked!!")
self._name = name
self._teleop_sub = rospy.Subscriber(
"/donkey_teleop",
AckermannDriveStamped,
self.joy_callback,
queue_size=1,
buff_size=2 ** 24,
)
rospy.loginfo("Teleop Subscriber Awaked!! Waiting for joystick...")
def joy_callback(self, msg):
speed_pulse = msg.drive.speed
steering_pulse = msg.drive.steering_angle
print(
"speed_pulse : "
+ str(speed_pulse)
+ " / "
+ "steering_pulse : "
+ str(steering_pulse)
)
self._throttle.run(speed_pulse)
self._steering_servo.run(steering_pulse)
- PCA9685 Class
이 class는 donkeycar 프로젝트에서 가져온 것입니다. donekycar는 오로지 파이썬으로 짜여있기 때문에 대부분의 작업들이 threading을 통해 병렬 처리됩니다. ROS를 사용하게 되면, 이러한 작업은 크게 신경쓰지 않아도 된다는 장점이 있습니다.
class PCA9685:
"""
PWM motor controler using PCA9685 boards.
This is used for most RC Cars
"""
def __init__(
self, channel, address=0x40, frequency=60, busnum=None, init_delay=0.1
):
self.default_freq = 60
self.pwm_scale = frequency / self.default_freq
import Adafruit_PCA9685
# Initialise the PCA9685 using the default address (0x40).
if busnum is not None:
from Adafruit_GPIO import I2C
# replace the get_bus function with our own
def get_bus():
return busnum
I2C.get_default_bus = get_bus
self.pwm = Adafruit_PCA9685.PCA9685(address=address)
self.pwm.set_pwm_freq(frequency)
self.channel = channel
time.sleep(init_delay) # "Tamiya TBLE-02" makes a little leap otherwise
self.pulse = 340
self.prev_pulse = 340
self.running = True
def set_pwm(self, pulse):
try:
self.pwm.set_pwm(self.channel, 0, int(pulse * self.pwm_scale))
except:
self.pwm.set_pwm(self.channel, 0, int(pulse * self.pwm_scale))
def run(self, pulse):
pulse_diff = pulse - self.prev_pulse
if abs(pulse_diff) > 40:
if pulse_diff > 0:
pulse += 0.7 * pulse_diff
else:
pulse -= 0.7 * pulse_diff
self.set_pwm(pulse)
self.prev_pulse = pulse
def set_pulse(self, pulse):
self.pulse = pulse
def update(self):
while self.running:
self.set_pulse(self.pulse)Adafruit_PCA9685 모듈을 가져오는 모습이 보이며, PWM Pulse를 조절하여 모터를 구동시킬 수 있습니다.
- 이전 calibration 강의에서 보았듯, 갑자기 큰 조향을 주면, 멈춰버릴 수 있기 때문에 다음과 같은 처리가 들어갔습니다. (maze 예제에서 보았던 방식이지요?)
if abs(pulse_diff) > 40:
if pulse_diff > 0:
pulse += 0.7 * pulse_diff
else:
pulse -= 0.7 * pulse_diff
다시금 PCA9685 클래스를 사용하는 부분을 가져왔습니다.
throttle, steering이 각각 0번 1번 채널을 사용하고 있다는 점 상기시켜드립니다.
class Vehicle(object):
def __init__(self, name="donkey_ros"):
self._throttle = PCA9685(channel=0, busnum=1)
rospy.loginfo("Throttle Controller Awaked!!")
self._steering_servo = PCA9685(channel=1, busnum=1)
rospy.loginfo("Steering Controller Awaked!!")
joy teleop axes
이 노드는, mit-racecar 라는 프로젝트에서
필요한 부분을 가져와 수정한 것입니다. 훌륭한 프로젝트이니 시간이 되실 때 함께 살펴보시면 좋습니다. 👍👍
Originally from https://github.com/ros-teleop/teleop_tools Pulled on April 28, 2017. Edited by Winter Guerra on April 28, 2017 to allow for default actions.

코드를 볼 필요없이, 사용하기 편리하게 설정 부분을 따로 yaml 파일로 빼둔 프로젝트인데요. 다음과 같은 위치에 있습니다.
- donkey_joy/config/joy_teleop.yaml
joy_node:
deadzone: 0.01
autorepeat_rate: 20
coalesce_interval: 0.01
teleop:
# Default mode - Stop for safety
default:
type: topic
is_default: true
message_type: ackermann_msgs/AckermannDriveStamped
topic_name: donkey_teleop
message_value:
-
target: drive.speed
value: 370.0
-
target: drive.steering_angle
value: 375.0
# Enable Human control by holding Left Bumper
human_control:
type: topic
message_type: ackermann_msgs/AckermannDriveStamped
topic_name: donkey_teleop
deadman_buttons: [4]
axis_mappings:
-
axis: 1
target: drive.speed
scale: 40.0 # joystick will command plus or minus 2 meters / second
offset: 380.0
-
axis: 2
target: drive.steering_angle
scale: 78.0 # joystick will command plus or minus ~20 degrees steering angle
offset: 375.0
# Enable autonomous control by pressing right bumper
# This switch causes the joy_teleop to stop sending messages to input/teleop
# And send messages to /dev/null (an unused ROS topic)
autonomous_control:
type: topic
message_type: std_msgs/Int8
topic_name: /dev/null
deadman_buttons: [5]
message_value:
-
target: data
value: 0message_type: 사용하는 topic msg 타입입니다.
topic_name: publish할 topic 이름입니다.
deadman_buttons: 트리거 버튼입니다. (컨트롤러 뒤에 LB버튼을 눌러줘야 한다고 말했었지요?)
axis_mappings/offset: 조종 신호의 영점으로, 앞선 donkey car calibration 당시 알아낸 값을 사용하였습니다.
axis_mappings/scale: offset 을 기점으로 어느 정도의 범위를 가지고 변화할 것인지 나타내는 값입니다.
joy node
이 노드는, ros에서 기본 제공하는 패키지입니다. 그래서
sudo apt-get 으로 설치가 가능했었지요.
사용하는 message type을 살펴보겠습니다.
$ rosmsg info sensor_msgs/Joy
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32[] axes
int32[] buttons
axes: 양쪽 조이패드 상하좌우 버튼에 매핑되며, 모두 최합하여 배열로 publish됩니다.
buttons: X Y A B 그리고 작은 타원형 버튼, 후면 L/R 버튼까지 모두를 mapping해서 배열로 전달하게 됩니다.
터미널을 통해 확인해 볼까요?
# connection check!!
$ sudo jstest /dev/input/js0
$ roscore
$ rosrun joy joy_node
$ rostopic echo /joy

Reference


첫번째 프로젝트를 마쳤습니다. 이 코드들을 사용해서 응용할 수 있는 것들이 마구마구 생각나지 않나요? 😉 저는 다음 강의로 넘어가서 카메라를 사용해보도록 하겠습니다. 📸