카테고리 없음
2. ROS 설치(데스크탑), 개발을 편리하게 해주는 도구들 안내
Swimming_Kim
2021. 1. 29. 17:50

2. ROS 설치(데스크탑), 개발을 편리하게 해주는 도구들 안내
Ubuntu Linux 18.04가 설치되어 있는 데스크탑을 기준으로 ROS를 설치해 봅시다
준비물
- 우분투 리눅스가 설치된 데스크탑 (혹은 외장 그래픽을 포함한 노트북) 1대
- 리눅스 커맨드 라인에 대한 약간의 지식
- 쾌적한 인터넷 환경
💡
로봇에 리눅스가 도는 것은 이해하는데... 우분투 데스크탑이 왜 필요한가요?
바로 실제 하드웨어로 넘어가기 전에, ROS의 주요 개념들을 시뮬레이션을 통해 익혀볼 예정입니다.
마치 우리가 게임을 할 때 좋은 그래픽 카드가 있으면 높은 해상도에서 멈춤 없이 플레이를 할 수 있듯이, 시뮬레이션을 로드하고 실행시킬 때에도 노트북보다는 데스크탑이 퍼포먼스 측면에서 유리합니다.
- 우분투 부팅 USB 만들기
Create a bootable USB stick on Windows | Ubuntu
With a bootable Ubuntu USB stick, you can: Install or upgrade Ubuntu Test out the Ubuntu desktop experience without touching your PC configuration Boot into Ubuntu on a borrowed machine or from an internet cafe Use tools installed by default on the USB stick to repair or fix a broken configuration Creating a bootable Ubuntu USB stick from Microsoft Windows is very simple and we're going to cover the process in the next few steps.
 https://ubuntu.com/tutorials/create-a-usb-stick-on-windows#10-installation-complete
https://ubuntu.com/tutorials/create-a-usb-stick-on-windows#10-installation-complete
💡
rufus 대신, BalenaEtcher를 사용해도 좋습니다. 후에 젯슨나노에 우분투 설치 시에도 다시 사용하게 됩니다.
- 우분투 & 윈도우 듀얼 부팅 환경 만들기 (GRUB)

image from : IT'S FOSS
🛠️ 우분투 설치를 원치 않으시다면, WSL을 사용한 윈도우 설치 방법도 링크해두니 참고하시기 바랍니다.
Install Windows Subsystem for Linux (WSL) on Windows 10
There are two options available for installing Windows Subsystem for Linux (WSL): Simplified install (preview release): wsl --install The wsl --install simplified install command requires that you join the Windows Insiders Program and install a preview build of Windows 10 (OS build 20262 or higher), but eliminates the need to follow the manual install steps.
Running ROS on Windows 10
The Windows Subsystem for Linux (WSL) is a compatibility layer which allows to run a whole bunch of linux binaries natively on Windows 10. With the advent of the Windows 10 Creators Update in March 2017, the WSL was heavily updated and now is able to run ROS lunar and melodic.
https://janbernloehr.de/2017/06/10/ros-windows
Terminator 설치
다중 분할 터미널을 위한 인터페이스

# ppa 등록
$ sudo add-apt-repository ppa:gnome-terminator
Enter
# 설치 전 업데이트
$ sudo apt-get update
# terminator 설치
$ sudo apt-get install terminator -y💻14강 - Jetson Nano 개발환경과 Python 가상환경 구성
vscode 설치
Visual Studio Code - Code Editing. Redefined
Visual Studio Code is a code editor redefined and optimized for building and debugging modern web and cloud applications. Visual Studio Code is free and available on your favorite platform - Linux, macOS, and Windows.
- Visual Studio IntelliCode
- Project Manager
- URDF
- C/C++
- Python
- CMake Tools
- Material Theme
- Code runner
- etc...
Additional Setup
$ sudo apt-get purge modemmanager
$ sudo adduser [사용자 계정 이름]
$ sudo usermod -aG sudo [사용자 계정 이름]reference : How to create sudo user on Ubuntu 18.04 Bionic Beaver Linux
Ubuntu ROS Melodic 설치
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apkey adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 오류 발생시
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
$ sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
$ sudo rosdep init
$ rosdep update참고 자료 : ROS Wiki
Wiki
A ROS distribution is a versioned set of ROS packages. These are akin to Linux distributions (e.g. Ubuntu). The purpose of the ROS distributions is to let developers work against a relatively stable codebase until they are ready to roll everything forward.

💡
위 설치는 젯슨 나노에 설치하는 것이 아니라!! 데스크탑(노트북)용 설치입니다!!
앞으로 다음과 같이 배보판 ROS 패키지들을 추가 설치할 수 있습니다!
$ sudo apt-get install ros-melodic-<package name>자동완성 tab키를 적극 사용하세요!!
설치 확인
- 새로 터미널을 열어야 합니다.
$ roscore
... logging to /home/kimsooyoung/.ros/log/5b440a74-4cda-11eb-a263-9cb6d08bf543/roslaunch-kimsooyoung-XPS-13-9370-10527.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:38251/
ros_comm version 1.14.10
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.10
NODES
auto-starting new master
process[master]: started with pid [10537]
ROS_MASTER_URI=http://localhost:11311/
setting /run_id to 5b440a74-4cda-11eb-a263-9cb6d08bf543
process[rosout-1]: started with pid [10559]
started core service [/rosout]다음과 같은 커맨드라인이 보였다면 완료된 것입니다!! 😉
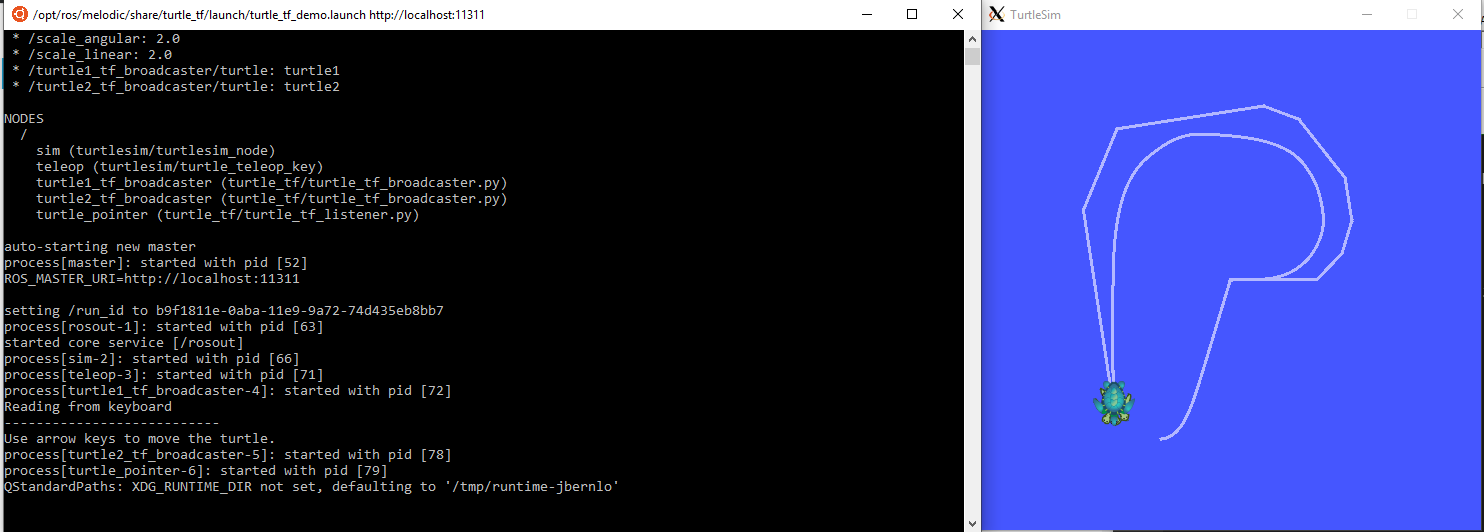
시험삼아 ROS 프로그램을 하나 실행시켜 보겠습니다.
$ rosrun turtlesim turtlesim_node
# 새 터미널 실행
$ rosrun turtlesim turtle_teleop_key위 커맨드 라인들도 모두 실행되셨다면, 문제없이 설치가 완료된 것입니다.
~/.bashrc 수정
$ gedit ~/.bashrc
# 파일 제일 아래에 다음과 같은 내용 입력
alias eb='gedit ~/.bashrc'
alias sb='source ~/.bashrc'
alias gs='git status'
alias gp='git pull'
alias cw='cd ~'
alias cs='cd ~/src'
alias cm='cd ~ && catkin_make'
alias cma='catkin_make -DCATKIN_WHITELIST_PACKAGES=""'
alias cop='catkin_make --only-pkg-with-deps'
alias sds='source devel/setup.bash'
alias axclient='rosrun actionlib axclient.py'
# 종료 후 터미널 업데이트
$ source ~/.bashrc각각의 명령이 어떤 의미를 가지는지는 앞으로 계속해서 다뤄봅니다.
다만, alias가 어떤 것인지만 살짝 짚어보고 넘어가겠습니다.